研究人员成功打造四足群机器人
作为一名机器人工程师,圣母大学电气工程助理教授Yasemin Ozkan-Aydin从生物系统中获得灵感。蚂蚁、蜜蜂和鸟类解决问题和克服障碍的集体行为是研究人员在空中和水下机器人技术中开发的。然而,开发能够穿越复杂地形的小型群体机器人面临着一系列独特的挑战。
在Science Robotics 上发表的研究中,Ozkan-Aydin 展示了她如何能够构建多腿机器人,这些机器人能够在具有挑战性的环境中机动并集体完成艰巨的任务,模仿自然世界的同行。
Ozkan-Aydin 说:“腿式机器人可以在崎岖地形和狭小空间等具有挑战性的环境中航行,四肢的使用提供了有效的身体支撑,实现了快速机动性并促进了障碍物的穿越。”“然而,有腿机器人在陆地环境中面临着独特的移动挑战,这会导致运动性能下降。”
Ozkan-Aydin 说,在这项研究中,她假设单个机器人之间的物理连接可以增强陆地有腿集体系统的移动性。单个机器人执行简单或小的任务,例如在光滑的表面上移动或搬运轻物体,但如果任务超出单个单元的能力,则机器人彼此物理连接以形成更大的多腿系统并集体克服问题。
“当蚂蚁收集或运输物体时,如果遇到障碍,该群体会集体努力克服该障碍。例如,如果路径中有间隙,它们将形成一座桥梁,以便其他蚂蚁可以穿越——这就是这项研究的灵感,”她说。“通过机器人技术,我们能够更好地了解这些生物系统的动力学和集体行为,并探索我们未来如何使用这种技术。”
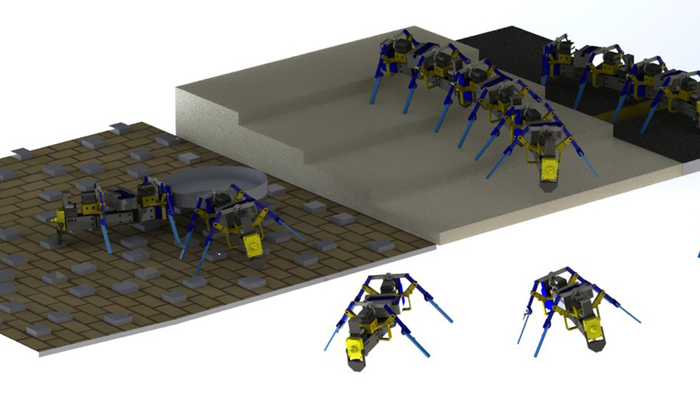
Ozkan-Aydin 使用 3D 打印机制造了长度为 15 到 20 厘米,或大约 6 到 8 英寸的四足机器人。每个都配备了锂聚合物电池、微控制器和三个传感器——前面有一个光传感器,前后有两个磁性触摸传感器,允许机器人相互连接。四个灵活的腿减少了对额外传感器和零件的需求,并为机器人提供了一定程度的机械智能,这有助于在崎岖或不平坦的地形上进行交互。
“您不需要额外的传感器来检测障碍物,因为腿部的灵活性有助于机器人直接越过障碍物,”Ozkan-Aydin 说。“他们可以测试路径上的缝隙,用身体搭建一座桥梁;单独移动物体;或连接以在不同类型的环境中共同移动物体,与蚂蚁没有什么不同。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
6月25-28日,由中国进出境生物安全研究会、中国国际旅行卫生保健协会主办,中国青年创业就业基金会支持,中国出入...浏览全文>>
-
胃肠镜检查,听起来可能有些令人不安,但实际上,它可能是生活中的救命稻草。对于一些人来说,定期进行胃肠镜...浏览全文>>
-
6月16日-20日,2025年优秀博士后研究人员(绍兴)研学活动顺利举行。本次活动汇聚了来自全国各地的百余名博士后,...浏览全文>>
-
近日,天津松果生物医疗科技有限公司自主研发的牛跟腱来源去端肽I型胶原蛋白原材料成功通过国家药品监督管理局...浏览全文>>
-
在数字化产业转型的浪潮奔涌之际,病理学正经历着前所未有的革新机遇。奥伟登(Evident)凭借百年光学技术积淀,以...浏览全文>>
-
6月6-8日,CHINAGUT 2025中国肠道大会在宁波国际会议中心隆重举办。大会由南京医科大学第二附属医院、国家消化...浏览全文>>
-
在第28届北京国际口腔展这一行业风向标级盛会上,北京易岭生物科技有限公司(下面简称易岭生物)凭借重磅新品发...浏览全文>>
-
2025款上汽大众ID 4 X在安徽阜阳地区的售价会根据配置和选装包有所不同。基础版车型的厂商指导价大约在20万...浏览全文>>
-
岚图FREE,作为一款集豪华与智能于一体的新能源SUV,正以全新的姿态迎接每一位渴望高品质出行的用户。现在,岚...浏览全文>>
-
安徽阜阳的大众ARTEON 2022新款现已到店,最低售价从34 80万元起,无疑是近期购车的最佳时机。这款车型以其...浏览全文>>