导读 本研究由曹毅教授(南京大学物理系)和王伟教授(南京大学物理系)牵头。他们提出了一种称为SHARK的单层水凝胶人造皮肤,它结合了高拉伸性、自
本研究由曹毅教授(南京大学物理系)和王伟教授(南京大学物理系)牵头。他们提出了一种称为“SHARK”的单层水凝胶人造皮肤,它结合了高拉伸性、自愈特性和超灵敏机械传感。
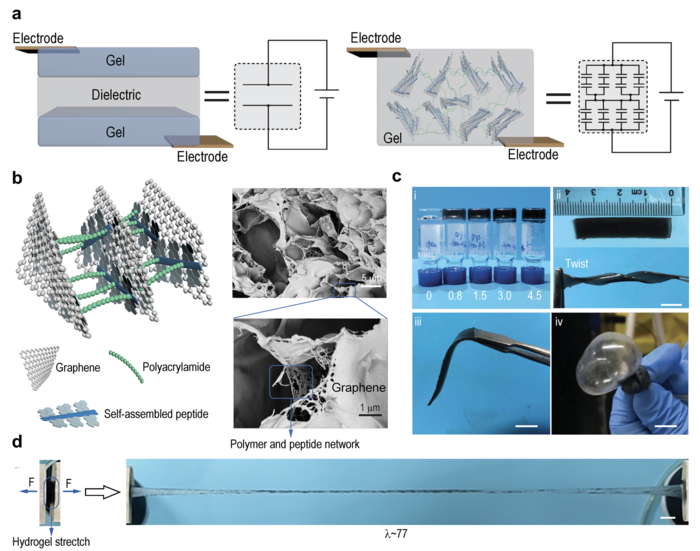
水凝胶已成为构建类皮肤机械传感器的有前途的材料。基于水凝胶的人造皮肤的常见设计需要夹在两个水凝胶层之间的电介质用于电容传感。然而,这种平面配置限制了灵敏度、拉伸性和自愈性能。水凝胶和弹性体层无与伦比的机械性能通常会导致在多次应变循环下分层。实现水凝胶和弹性体层的同时自愈以完全恢复水凝胶人造皮肤的功能几乎是不可能的。尽管取得了重大进展,但实现高度可拉伸但可自我修复的基于水凝胶的机械传感器需要新颖的设计理念。
在这项工作中,该团队报告了具有体电容结作为机械传感器的单层复合水凝胶的第一个设计。他们设计了介电肽包被的石墨烯(PCG)作为水凝胶中均匀分散的双电层。整个系统可以看作是由多个微电容器串并联形成的大容量电容器结。因此,SHARK 具有更大的等效双电层面积,因此比平面形状的水凝胶传感器具有更高的灵敏度。任何影响水凝胶中 PCG 微观分布的机械运动都会显着改变整体电容。“微电容器分散在 SHARK 的凝胶基质中,形成类似于人体皮肤的分布式但相互连接的机械传感器”,易说。
SHARK 的机械和电气性能也值得推荐。由于水凝胶网络和石墨烯之间强大而动态的界面相互作用,水凝胶人造皮肤可以拉伸至其原始长度的 77 倍,并在不到一分钟的时间内完全自我修复其机械和电性能。它们具有高灵敏度,应变传感的应变系数为 1.39,可以有效地传感空气和水环境中的应变和压力。此外,它们是可重构和可打印的,使得构建基于 SHARK 的传感器芯片变得方便。
标签:
免责声明:本文由用户上传,如有侵权请联系删除!